どうも、さわざわです。
今回は回路の安定性について、基礎的な部分を触れていこうと思うよ。前回ネガティブフィードバック(NFB)を考えて、その利点が大きいって話だったと思うんだけど、NFBを用いるうえで安定性を考慮した設計をしないといけないよ。これが正しく設計されていないと、特性云々ってだけでなく機能を担保できなくなってしまうこともあるので、アナログ回路設計の重要な内容だと思うよ。みんなも勉強していってねい。
この記事を読めば、安定性設計についてポールと位相余裕を考慮した基礎的な理解ができ、回路特性における安定性の影響へとつながります。
回路における安定性とは?
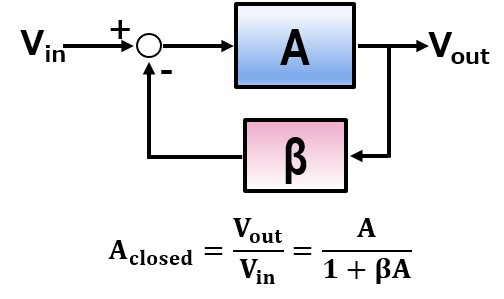
以下の基本的なブロック図は前回も出てきたけど、出力にフィードバックゲインをかけて入力から引くってのが、NFBだったね。このブロック図の伝達関数ってのは以下になっていたね。このような回路にするメリットってのは、前回の記事を読んでみてね。
→ネガティブフィードバックについて
ここで回路の応答が高周波になっていったときに、フィードバック信号がどんどん遅延していくと、フィードバック信号が以下のように位相が180degずれちゃうことが考えられるよ。
その時にAβが1以上だと、出力信号がどんどん足されて大きくなっていく正帰還となって、回路は発振するよ。
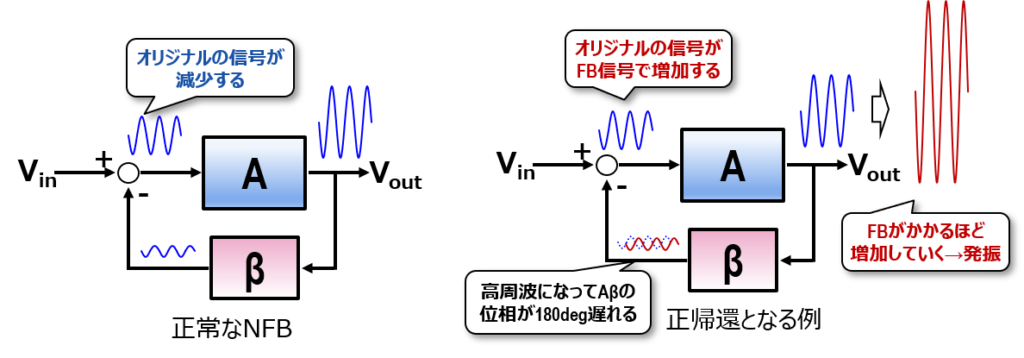
なので以下の条件の際に、回路が発振することになるよ。これはさっきの伝達関数でいうと、分母が0になったことを意味するわけだから、発振の特性になるのはイメージしやすいんじゃないかな。

位相余裕とポールついて
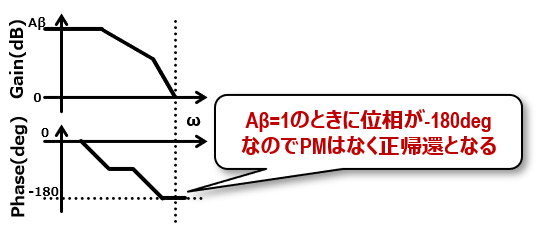
ここで位相余裕っていう重要な指標について説明するよ。位相余裕(Phase MarginでPM)ってのはAβ=1の際に、-180degに対してどれだけマージンがあるかってものになるよ。例えば以下のようにAβ=1の時点で-180deg回ってたらPM=0degってわけで全く余裕がなく、正帰還。
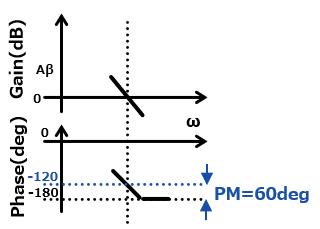
なので安定性を考えると、以下のようにできるだけPMを持ちたいなってなる。次回以降触れるけど、PMがめちゃくちゃある安定すぎる回路特性が良いというわけではないよ。
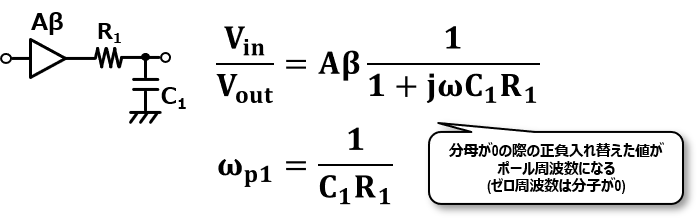
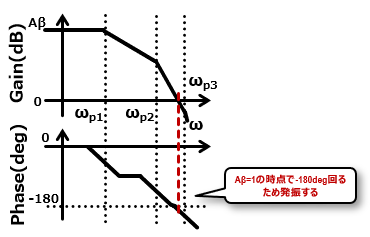
ここでPMがどうやって決まっていくかをイメージするために、まずはポールについて考えよう。ポールってのは最初にローパスフィルタやハイパスフィルタについて話をしたけど、以下のように一つのローパスフィルタ(LPF)を考えたときにこのポール周波数ωp=1/RCってなるね。
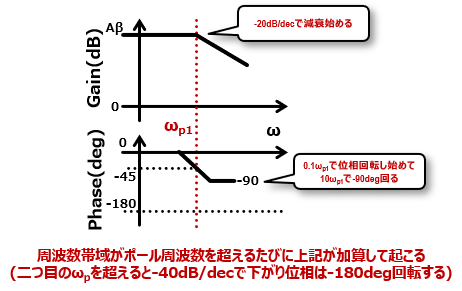
ポール周波数ってのは信号伝達の周波数に依存したゲイン変動と位相変動を示してくれていて、まずゲインでいうとωpを超えるとゲインは-20dB/decの傾きで下がっていくんだったね。
そして位相は0.1ωpから位相が遅れ始めて、ωpで-45deg回り、10ωpで-90degまで位相が回転するんだ。
ちなみにハイパスフィルタにいるゼロ周波数ωzはその逆の特性で、ゲインは+20dB/decで大きくなり10ωzで+90deg位相が回転するんだ。
→ハイパスフィルタについて
なので、単体のローパスフィルタだと位相はそもそも-90degしか回転しないから安定性が悪くなるはずはないんだけど(なので一次伝達関数はかなりシンプルだよね)、実際の信号経路には多くのポールが存在していて、それらを考慮してゲインと位相の関係をみてPMを見積もる必要があるよ。
不安定のケースと安定化に向けて
例えば等価的にローパスフィルタが以下のように多く並んでいて、それぞれのポール周波数を文字で置いていたとしよう。
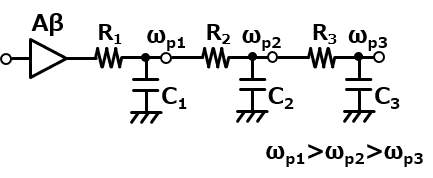
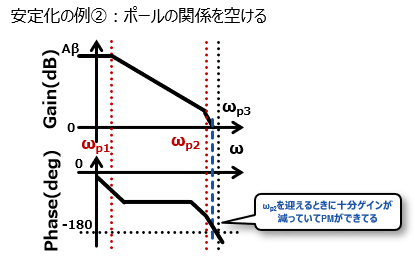
もし以下のようなポールの関係だったとすると位相余裕はなくなって不安定になるよね。
ここで安定動作には何が必要なのか考えてみてほしい。
まず位相については、入力を基準にとって180deg回るかってことなので、なんというか2個目のポールまでが考慮の大半であればよさそうな。んで彼らはポールの関係とかどうでもよく2個目で180deg回ると。
そうなると設計で安定性のために手を加えられるのって二つくらいしかないと思っていて、一つはAβ。これはゴールが1と決まっているのに対して、Aβから1までの距離が近ければ、2個目のポールを迎える前に1にたどり着いて、180deg回る際には1を下回って安定的といえるね。
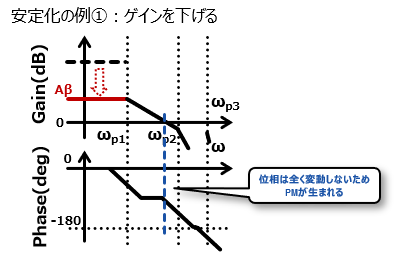
もう一つは1個目のポールと2個目のポールの位置を離す。結局180deg回転することには変わりないけど先に90deg回して-20deg下がる期間が長いと、2個目のポールを迎える際にこれも1を下回れる。
二つといったけどほぼ同じようなことをいってるかもね。ただAβを下げるってオープンループゲインであるAを下げる場合は他の特性にも影響出るかもしれないし、βを極端に下げても本来のNFBに利点が効かなくなってしまうので、ポールを離すってのが現実的なのかもしれないね。
ポールや位相余裕などについては以下に網羅されているし、

Analog Integrated Circuit Design
以下にも詳細がかかれているので読んでみてねん(第二版で位相余裕もちょろっと内容が追加されとる)。

Design Of Analog Cmos Integrated Circuit , 2Nd Edition
余談:時間と安定性
アナログ回路は多くのトレードオフが存在する一方で、安定性の対義語は動作時間なのかもしれない。制御工学では以下のように言われるようで、これはTが時間でSは安定性を表しており、和は有限でありどっちかにしか調整できないことを表しているよ。
なので二つの最適な関係を探す必要があって、これについて次回はセトリングを例にとって説明するね。
今回どうなれば安定的な動作になるかもLPFを例にごくごく簡単に触れてたけど、これは全て動作速度を遅くすることにつながっている設計になっているってことを、今一度読み返して確認してみてほしい。(でもこれってなんかすごい違和感があるように、さわざわは感じるような、、?)
次回予告
今回はイメージ的な部分を理解するためだったのでLPFでの等価的な内容だったけど、次回は実際の回路特性なども考えてオペアンプで安定性を考えるよ。そしてその位相補償につなげていこうと思うよ。
今日はここまで、ほな。
雑談枠
新入社員が入ってきているようで(侵入社員ってか?がはは)、また相対的に大人になっちまったってわけ。さわざわが新入社員の頃ってもはや太古の話かもしれないけど、学生研究のオーバーワークと比べて驚愕したような気がする(最初の試用期間は特に)。
なのにお金もらえて至れり尽くせりって感じた記憶。でも学生研究の頃みたいに週1,2回は徹夜するってのも今ではいい思い出のような。今は絶対できないけど。
おすすめ書籍紹介(Amazonに飛びます)

アナログCMOS集積回路の設計 (基礎編)
(最近第2版が出て原版のupdateが反映された感じ)

アナログCMOS集積回路の設計 (応用編)
(最近第2版が出て原版のupdateが反映された感じ、以下のソフトカバーと比較すると高い気が。。)
Design Of Analog Cmos Integrated Circuit , 2Nd Edition
(↑の原版のIndian版(英語)で2ndからは訳書にない新内容有り、ペーパーバックは安め。英語に抵抗ない方はこっち買うほうが内容的にも値段的にもお得)
Analog Integrated Circuit Design
(網羅的かつ設計観点で深めに学べる印象なのにわかりやすく書いてて初級向け、演習も易しめで取っつきやすい。ただハードカバーのため高い、、)

CMOSアナログ回路入門: LSI設計者のための (半導体シリーズ)
(初学者向け。実用的な内容もあるがあまり深ぼらないので、あくまで勉強するきっかけを作る本な気が。)
Xアカウント
https://x.com/swzw6112
–お問い合わせ–
以下よりお願いします。